MOTOSim EG-VRC
Description
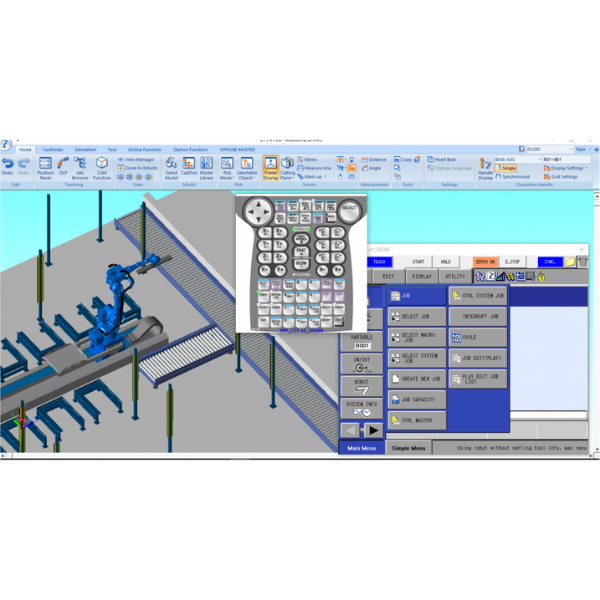
MOTOSim EG-VRC is offline programming software for Yaskawa robots, used to create 3D simulations of complex systems.
The simulation software uses the same kinematic model as the robot controller and the INFORM language, making it possible to create robot jobs offline.
Can Be Used For:
- Offline execution of programs for Yaskawa robots
- Studies on the reach and accessibility of robots, peripherals and equipment
- Cycle time analysis
- Offline trajectory programming
- Collision detection
- System setup
- Functional Security Unit (FSU) configuration
- Remote access to the real robot controller
Key Benefits:
- High accuracy rate
- Reduction of programming times
- Reduction of robot/cell installation times
- Reduction of downtime and consequent increase in production line activity
- Ability to program new parts before production starts
- Ability to increase efficiency by modifying any current robot program and simplify programming with a detailed graph that provides the robot’s trajectory
- Supports simulation of multiple robots and multiple controllers
- Support tool in project development
- Testing new applications or new tools




